🧐Bloom Filter
空间效率高的概率型数据结构,用来检查一个元素是否在一个集合中
对于一个元素检测是否存在的调用,BloomFilter会告诉调用者两个结果之一:可能存在或者一定不存在
在判断一个元素是否属于某个集合时,有可能会把不属于这个集合的元素误认为属于这个集合(false positive)。因此,Bloom Filter不适合那些“零错误”的应用场合。而在能容忍低错误率的应用场合下,Bloom Filter通过极少的错误换取了存储空间的极大节省。
BitMap & Bloom Filter
为减少内存开销,仅仅针对知道是否存在,使用位图算法:
如需求是要根据网页URL(字节数很大)判断网页是否在黑名单:
每个map值都使用1bit,这样大大降低了内存开销,具体做法是,我们使用一个Hash函数将URL映射到大小为n的bit数组中,并置相应位置为True
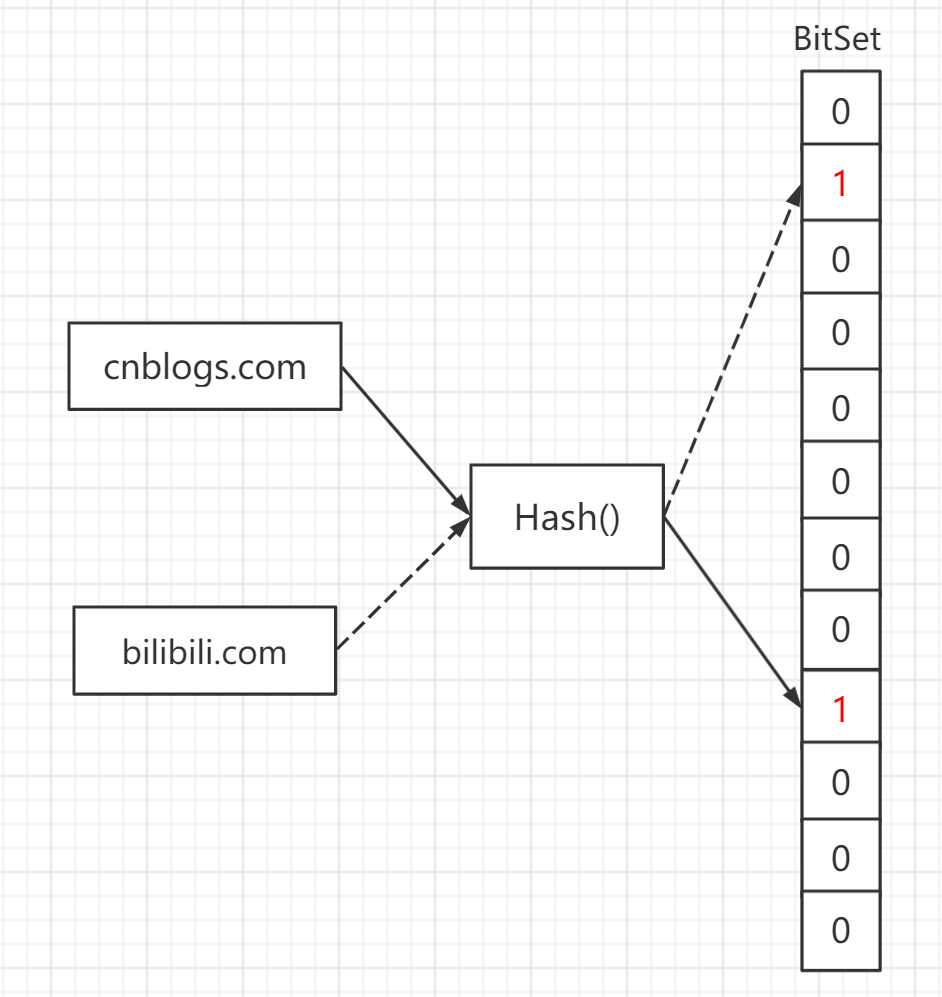
可以在尽可能低的内存开销下,实现O(1)时间的判断URL是否存在黑名单中。
但不得不面对的一个问题就是,即使采取再好的哈希函数,都会出现哈希冲突的情况,在查询阶段出现哈希冲突意味着查询错误,会返回一个错误的结果,而想尽可能的降低哈希冲突,我们需要位图大小比黑名单中URL数量大的多,我们考虑随机哈希的情况下,查询碰撞的概率是:黑名单URL数量/位图大小。所以要想查询准确率高,又带来了更高的内存开销,而可以有效改善这种情况的一种数据结构就是(Bloom Filter)
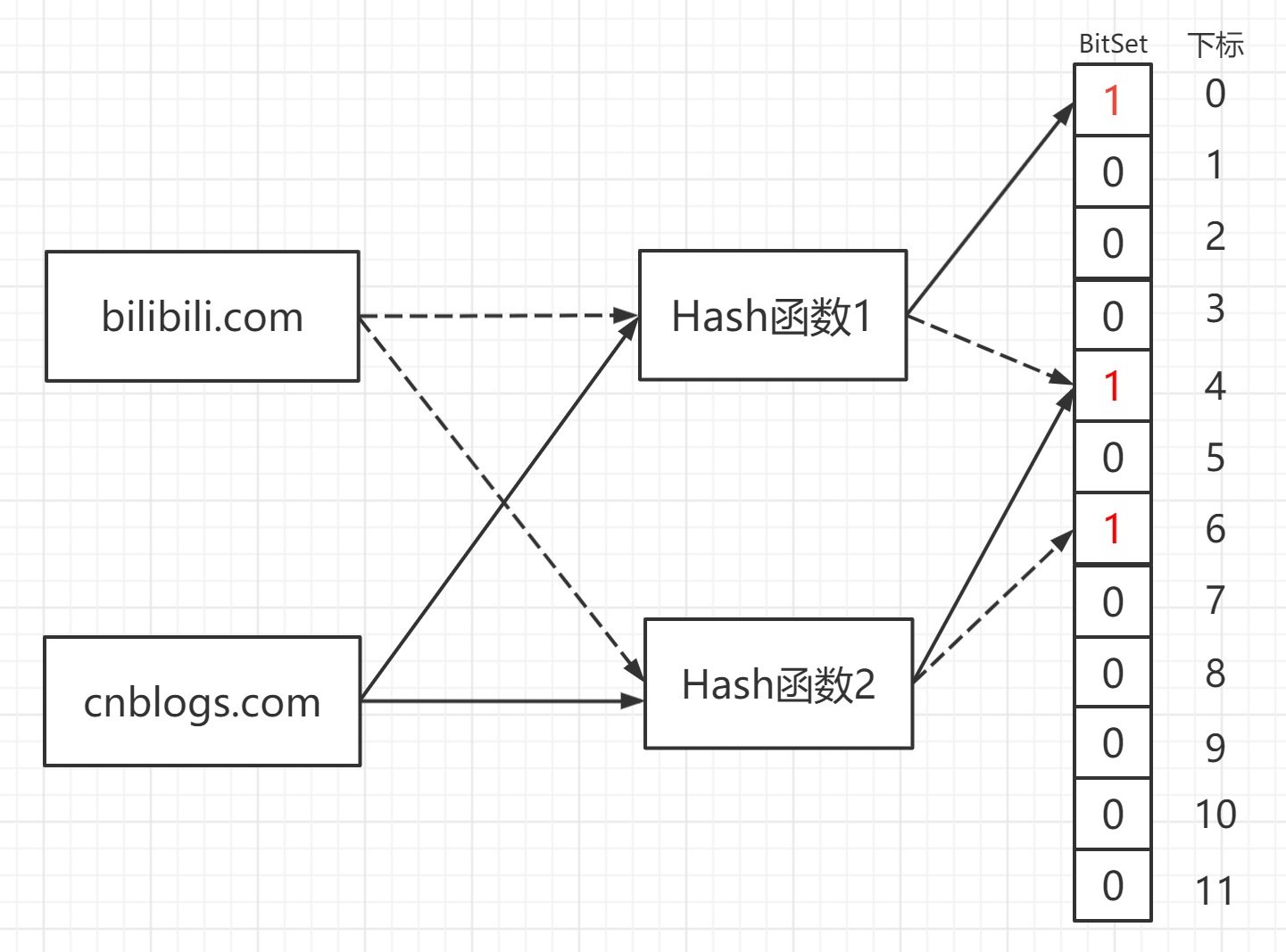
使用多个Hash函数对数据进行哈希操作(如下图使用了两个hash函数),这样得出多个位置为True,相比位图它在有限的空间内,尽可能的降低了查询失败的可能,这一点可以从信息熵的角度来看,每一个位置所包含的信息更加多了,所以比起位图来说,布隆过滤器对空间的利用率也变大了
集合表示和元素查询
下面我们具体来看Bloom Filter是如何用位数组表示集合的。初始状态时,Bloom Filter是一个包含m位的位数组,每一位都置为0。

为了表达S={x1, x2,…,xn}这样一个n个元素的集合,Bloom Filter使用k个相互独立的哈希函数(Hash Function),它们分别将集合中的每个元素映射到{1,…,m}的范围中。对任意一个元素x,第i个哈希函数映射的位置hi(x)就会被置为1(1≤i≤k)。注意,如果一个位置多次被置为1,那么只有第一次会起作用,后面几次将没有任何效果。在下图中,k=3,且有两个哈希函数选中同一个位置(从左边数第五位)。
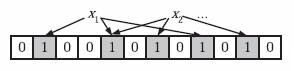
在插入一个元素时,会使用k个hash函数,来计算出k个在bit array中的位置,然后,将bit array中这些位置的bit都置为1
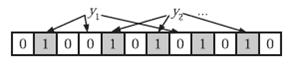
在判断y是否属于这个集合时,我们对y应用k次哈希函数,如果所有hi(y)的位置都是1(1≤i≤k),那么我们就认为y是集合中的元素,否则就认为y不是集合中的元素。下图中y1就不是集合中的元素。y2或者属于这个集合,或者刚好是一个false positive
不允许有删除操作,因为删除后,可能会造成原来存在的元素返回不存在,这个是不允许的
不允许删除的机制会导致其中的无效元素可能会越来越多,即实际已经在磁盘删除中的元素,但在bloomfilter中还认为可能存在,这会造成越来越多的false positive,在实际使用中,一般会废弃原来的BloomFilter,重新构建一个新的BloomFilter
如果要布隆过滤器支持删除,那么怎么办呢?
有一个叫做 Counting Bloom Filter:
它用一个 counter 数组替换数组的比特位,这样一比特的空间就被扩大成了一个计数器, 用多占用几倍的存储空间的代价,给 Bloom Filter 增加了删除操作。
但是还有更好的解决方案,那就是布谷鸟过滤器。
对比
常用的数据结构,如hashmap,set,bit array都能用来测试一个元素是否存在于一个集合中
对于
hashmap,其本质上是一个指针数组,一个指针的开销是sizeof(void *),在64bit的系统上是64个bit,如果采用开链法处理冲突的话,又需要额外的指针开销,而对于BloomFilter来讲,返回可能存在的情况中,如果允许有1%的错误率的话,每个元素大约需要10bit的存储空间,整个存储空间的开销大约是hashmap的15%左右对于
set:如果采用
hashmap方式实现,情况同上如果采用平衡树方式实现,一个节点需要一个指针存储数据的位置,两个指针指向其子节点,因此开销相对于
hashmap来讲是更多的
对于
bit array,对于某个元素是否存在,先对元素做hash,取模定位到具体的bit,如果该bit为1,则返回元素存在,如果该bit为0,则返回此元素不存在。可以看出,在返回元素存在的时候,也是会有误判的,如果要获得和BloomFilter相同的误判率,则需要比BloomFilter更大的存储空间
劣势:
相对于
hashmap和set,BloomFilter在返回元素可能存在的情况中,有一定的误判率,这时候,调用者在误判的时候,会做一些不必要的工作,而对于hashmap和set,不会存在误判情况对于
bit array,BloomFilter在插入和查找元素是否存在时,需要做多次hash,而bit array只需要做一次hash,实际上,bit array可以看做是BloomFilter的一种特殊情况
以一个例子具体描述使用BloomFilter的场景,以及在此场景下,BloomFilter的优势和劣势。
一组元素存在于磁盘中,数据量特别大,应用程序希望在元素不存在的时候尽量不读磁盘。
此时,可以在内存中构建这些磁盘数据的BloomFilter,对于一次读数据的情况,分为以下几种情况:
请求的元素不在磁盘中,如果BloomFilter返回不存在,那么应用不需要走读盘逻辑,假设此概率为P1;如果BloomFilter返回可能存在,那么属于误判情况,假设此概率为P2
请求的元素在磁盘中,BloomFilter返回存在,假设此概率为P3
如果使用hashmap或者set的数据结构,情况如下:
请求的数据不在磁盘中,应用不走读盘逻辑,此概率为P1+P2
请求的元素在磁盘中,应用走读盘逻辑,此概率为P3
假设应用不读盘逻辑的开销为C1,走读盘逻辑的开销为C2,那么,BloomFilter 和 hashmap 的开销为
因此,BloomFilter 相当于以增加P2 * (C2 - C1)的时间开销,来获得相对于hashmap而言更少的空间开销。
既然P2是影响BloomFilter性能开销的主要因素,那么BloomFilter设计时如何降低概率P2(即false positive probability)呢
参数取值
实际应用关注 false positive,因为和额外开销有关,实际应用中期望给定一个 false positive probability 和将要插入的元素的数量
依然是上文的 m, n, k,false positive probability = p
=> :
如果需要最小化 false positive probability,则k的取值如下(①)
而p的取值,和m,n又有如下关系(②)
把①代入②,得出给定n和p,k的取值应该为
最后,也同样可以计算出m
BloomFilter实现及优化
Basic version
DS:
整个BloomFilter包含三个操作:
初始化:即上述代码中的构造函数
插入:即上述代码中的insert
判断是否存在:即上述代码中的key_may_match
Optimization
多次调用了hash_func函数,这对于计算比较长的字符串的hash的开销是比较大的
多次调用了hash_func函数,这对于计算比较长的字符串的hash的开销是比较大的
可以采用两次hash的方式来替代上述的多次的计算:
例如insert_optimized:
先用通常的hash函数计算一次,然后,使用移位操作计算一次,最后,k次计算的时候,不断累加两次的结果
优化后,最大的false positive probability增长,可以增加k来弥补,因为优化后的hash算法,在k增长时,带来的开销相对来讲不大
P.S.:
int_t 为一个结构的标注,可以理解为type/typedef的缩写,表示它是通过typedef定义的,而不是一种新的数据类型。因为跨平台,不同的平台会有不同的字长,所以利用预编译和typedef可以最有效的维护代码
int8_t: typedef signed char;
uint8_t: typedef unsigned char;
int16_t: typedef signed short ;
uint16_t: typedef unsigned short ;
int32_t: typedef signed int;
uint32_t: typedef unsigned int;
int64_t: typedef signed long long;
uint64_t: typedef unsigned long long;
size_t与ssize_t
size_t主要用于计数,如sizeof()函数返回值类型即为size_t,在不同位的机器中所占的位数也不同
size_t是无符号数,ssize_t是有符号数。在32位机器中定义为:typedef unsigned int size_t; (4个字节) 在64位机器中定义为:typedef unsigned long size_t;(8个字节)
由于size_t是无符号数,因此,当变量有可能为负数时,必须使用
ssize_t:因为当有符号整型和无符号整型进行运算时,有符号整型会先自动转化成无符号
四种类型转换运算符
static_cast
用于良性转换,一般不会导致意外发生,风险很低: 原有的自动类型转换, void 指针和具体类型指针之间的转换, 有转换构造函数或者类型转换函数的类与其它类型之间的转换,不过static_cast 不能用于无关类型之间的转换(两个具体类型指针之间的转换、int 和指针之间的转换),转换失败的话会抛出一个编译错误;
const_cast
用于 const 与非 const、volatile 与非 volatile 之间的转换。
reinterpret_cast
高度危险的转换,这种转换仅仅是对二进制位的重新解释,不会借助已有的转换规则对数据进行调整,但是可以实现最灵活的 C++ 类型转换。可以认为是 static_cast 的一种补充,一些 static_cast 不能完成的转换,就可以用 reinterpret_cast 来完成,例如两个具体类型指针之间的转换、int 和指针之间的转换(有些编译器只允许 int 转指针,不允许反过来)
dynamic_cast
借助 RTTI,用于类型安全的向下转型(Downcasting);与 static_cast 是相对的,dynamic_cast 是“动态转换”的意思,static_cast 是“静态转换”的意思。dynamic_cast 会在程序运行期间借助 RTTI 进行类型转换,这就要求基类必须包含虚函数,类向上转型是安全的(父类转子类),不做解释,向下转型不安全:每个类都会在内存中保存一份类型信息,编译器会将存在继承关系的类的类型信息使用指针“连接”起来,从而形成一个继承链:同一个类的不同对象指向同一个类型信息,有继承关系的类型信息组成一条链。当使用 dynamic_cast 对指针进行类型转换时,程序会先找到该指针指向的对象,再根据对象找到当前类(指针指向的对象所属的类)的类型信息,并从此节点开始沿着继承链向上遍历,如果找到了要转化的目标类型,那么说明这种转换是安全的,就能够转换成功,如果没有找到要转换的目标类型(直到继承链的顶点(最顶层的基类)还没有遇到),那么说明这种转换存在较大的风险,就不能转换。
这四个关键字的语法格式都是一样的,具体为:
xxx_cast<newType>(data)
newType是要转换成的新类型,data是被转换的数据
Last updated